
本記事は以下リンクの続きになります。
はじめに
物理的に歩く事が難しく、また知的障害(診断上の判断能力は1歳半)もあり電動機器の操作習得が難しい息子。
そんな息子の「自分で動きたいという意志を引き出す」事を目指した
息子専用のモビリティ(電動車椅子)の開発・練習記録を記しています。
これまで1年間、電動移動機器を操作してきた事で、「自分の行きたい方向(三方向)を選ぶ」事が出来る様になってきました。更に、本人が分かっている事(意志)を、
周囲の人に「この子、ちゃんと分かってるんだ」
と伝える事ができる効果を実感しました
この体験を、是非とも日常生活(特に小学校生活)で使っていきたい!
と考えて、小学校で使えそうな
「息子の手動車いすを電動化する電動台車ユニット」
の開発を進めています。
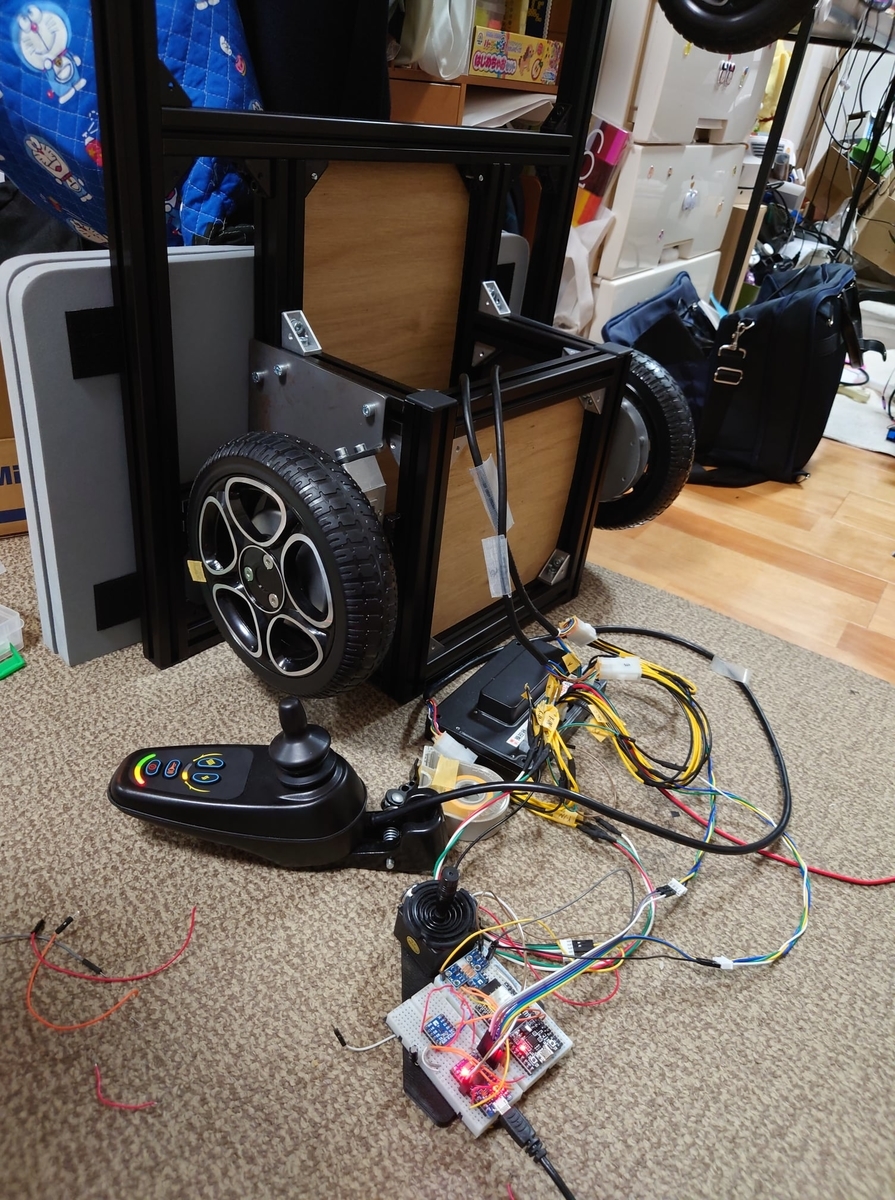
開発品(2021年5月末)
1カ月もの開発 & 調整を経て、2021年5月末に息子に初試走してもらいました。
息子の手押車椅子の電動化ユニット製作、ついに試し乗りしてみた
— おぎ-モトキ@父親エンジニア (@ogimotoki) 2021年5月30日
初乗りなのにあっさりと操作でき、すぐにお散歩へ
歩道のガタガタも問題なく走れたので、自分の力だけで登校出来るかも!
ガンガン進んだり、後ろを振り返ったり、『動ける』事で自分の意志を表現してる!#家族のためのモノづくり pic.twitter.com/HwI5pGpbHr
この最初の瞬間は本当に緊張しました…
息子氏は思いこみが強くずっと引っ張るタイプなので、最初に悪い印象を与えてしまうと、それからずっと拒否反応を示してしまうのです。なので、一番初めこそ失敗出来ない緊張感がありました。
結果として大成功!
今まで使ってきた電動車椅子と同じ操作感覚で動かせる事に気づいてくれて、いつも通りのやり方で通学路をお散歩してくれました!
通学路にある車道から歩道への乗り上げ段差2cmやガタガタ道路でも、問題なく走行!
普段の子供車椅子とほぼ同じくらいの横幅(50cm)なので、我が家の狭いエレベータにもちゃんと乗る事ができました!
また、黒フレーム剥き出しが結構男の子ウケするらしく、通りがかりの男の子に「カッコいい!」って言われました! 電動台車が移動支援機器を超えて、「友達との交流きっかけを作るツール」としても期待できそうです!


また、台車モデルにした事で、普段の車椅子よりも視界が高くなり、そのおかげでお姉ちゃんやお友達と近い目線になった!(これは製作して初めて得られた気付き!)
視界が変われば、見える世界が変わる、つまり体験感が変わるのです!
台車モデル(手動車いすと分離できる)の利点も実感する事ができ、いよいよ小学校への実用導入も見えてきました。
また、電動台車のメリットは、
車椅子を載せていない状態でも使える事
例えば、荷物を運んだりにも出来るし、座椅子を載せたら低姿勢モビリティにもなる!
自動運転と組み合わて面白い遊園地アトラクションっぽく出来るかも!?
小学校の登下校はもちろん、友達と一緒に遊べるアトラクションになったり、便利な荷物搬送ロボットになったり、たくさんの可能性が広がりそうな電動台車システムです。
製作方法
部品調達、メカ製作については、前記事を参照ください。
ogimotokin.hatenablog.com
モーターハック方法
まずはベースとなる電動車椅子のシステム構成図を以下に示します。

電動車椅子は大きく分けて、「モータ」「モータドライバ」「本体ジョイスティック」に分かれます。
外部デバイスからモーターを制御する簡単な方法は、「ジョイスティックで操作しているかの様に外部機器で代替する事」です。
以前の電動車椅子ハック時は、「ジョイスティック部に外部モーターを付けて外部デバイスで物理的にジョイスティックを動かしハックする」という【物理ハック方式】を採用しました。
この方式のメリットは「車椅子側を分解・改造しなくてよい」点ですが、その一方で「壊れやすい」「細かな速度制御を行うのが難しい」というデメリットが挙げられます。
今回はレンタル品でないため、分解・改造が可能である事を配慮して検討を進めます。本電動車椅子の電装パーツを解析してみたところ、どうやら「ジョイスティック」の前後左右情報は、ジョイスティック(可変抵抗)を通してアナログ信号電圧に変換されている事が分かりました。
電動車椅子の多くはUART通信やCAN通信等でジョイスティック~モータコントローラ通信が行われており、その場合は通信解析を進める必要がありますが、上記アナログ信号電圧であれば外部装置から該当信号の電圧値を制御すればよいため、すぐにでもハック可能です。この様な【電気信号ハック】を今回は採用しました。
システム構成
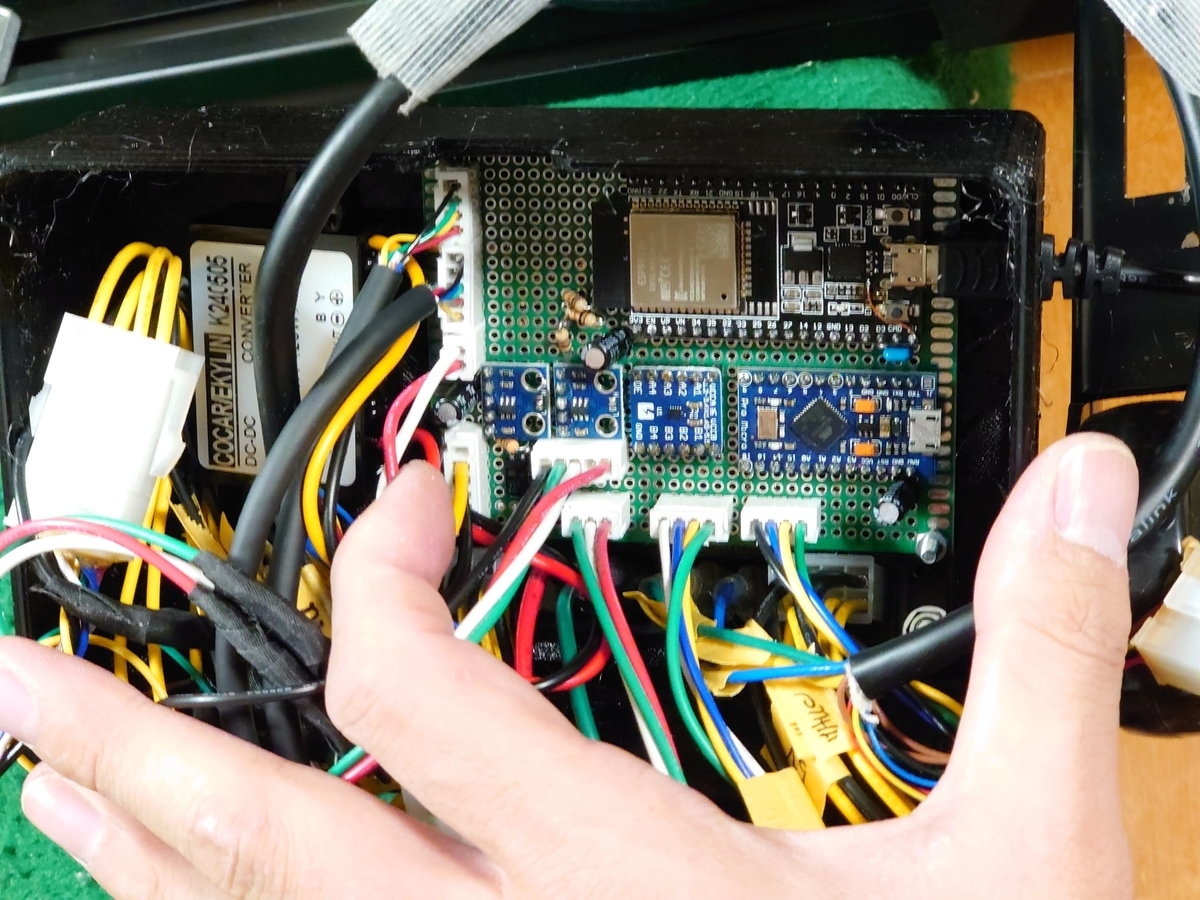
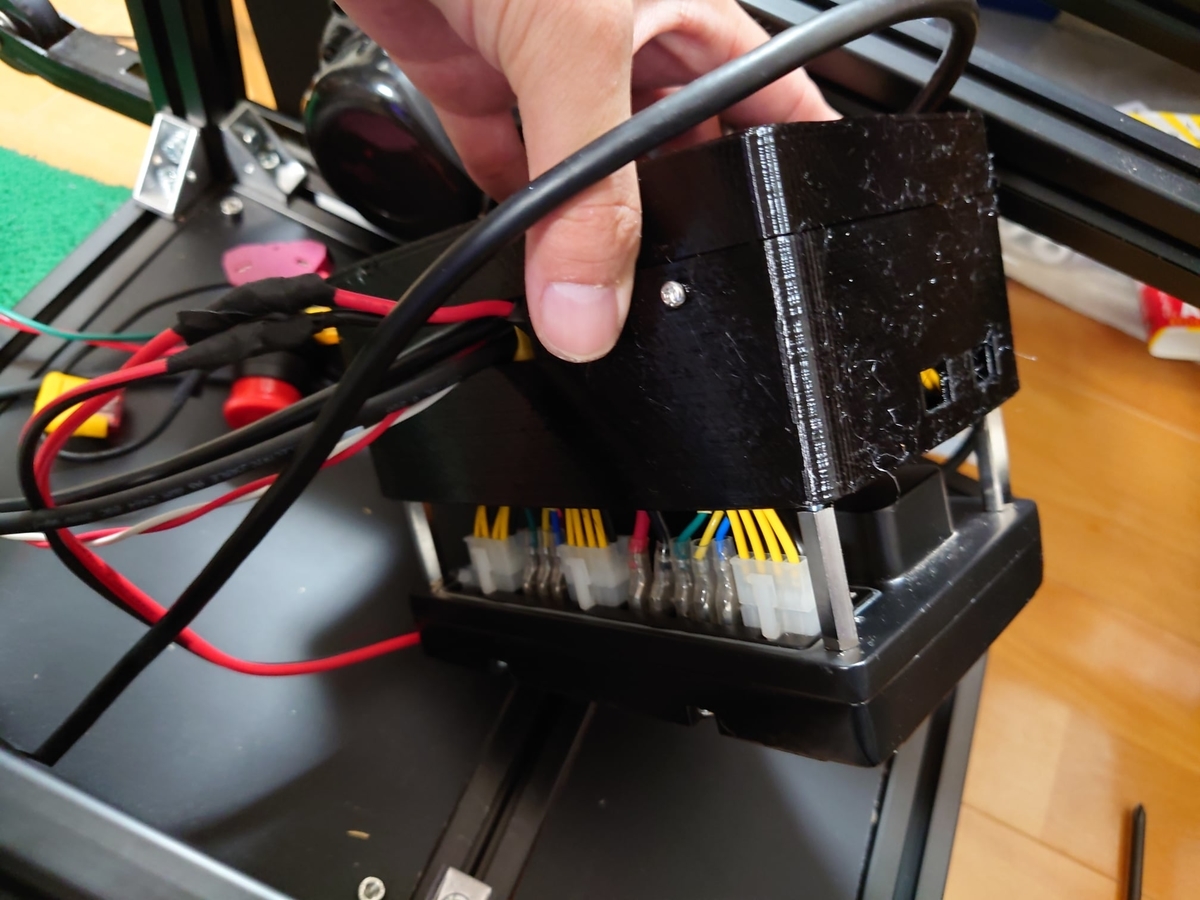
本台車のシステム構成図を示します。

モーターコントローラに繋がる配線をカットして、自作コントローラに繋げます。
ベースのマイコンはお馴染みの ESP32 DevKit C を使います。
ただし、車椅子のモータ速度検出用のホールセンサー(3本×2)や本体ジョイスティック信号の電圧は5Vであるため、ESP32(3.3V系)との間に5V系マイコンをI/F用として使います。今回は基板面積の最小化の観点でArduino Pro Microを使いました。ESP32とArduino Pro Microの間はUARTで双方向通信を行います。
なお、5V系マイコンからの制御信号(アナログ信号)ですが、Arduino Pro Microにはアナログ出力端子があるものの、これは純粋なアナログ信号ではなくPWM信号です。そのため、純粋なアナログ出力信号を出力するため、I2Cで制御可能なDACチップを使用します。
ESP32が走行系制御の中心となり、本体ジョイスティック/子供用三方向ジョイスティック/介助用無線ジョイスティックからの通知情報をマージして、走行方向を決定します。
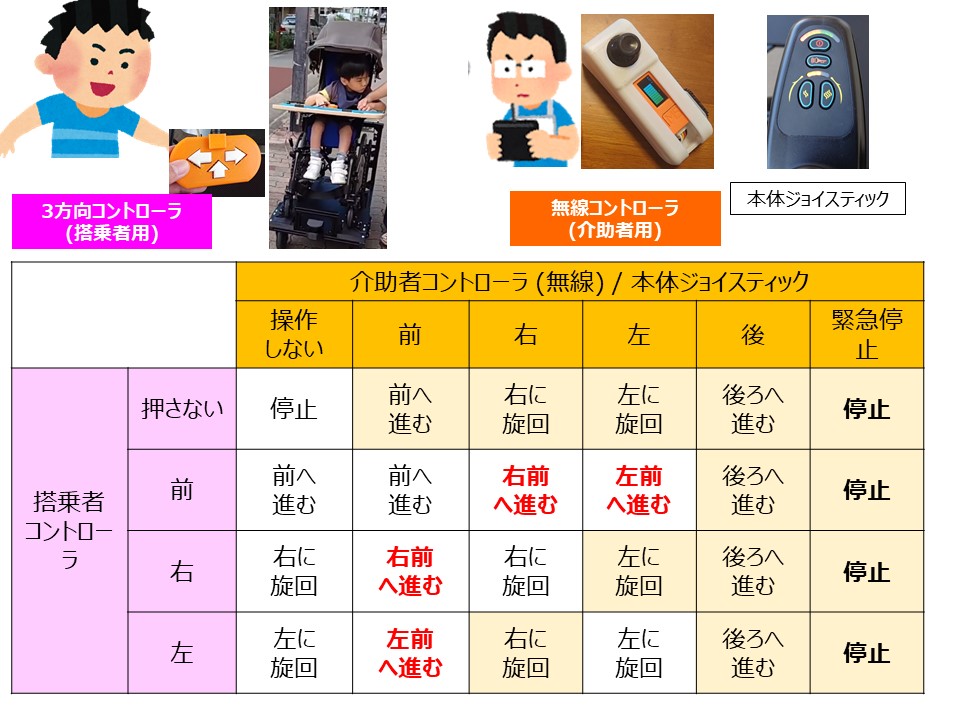
基本的には、介助コントローラの操作指示を最優先にしつつ、子供用コントローラにある「前に進む」意志はしっかりと動きに反映させる作りにしています。
また、介助コントローラのジョイスティック部を押し込む事で、介助側から「緊急停止」をできる様にしています。緊急停止命令が出た場合は、ただちに電動台車のモーター駆動系を落としただちに電磁ブレーキを利かせるため、すぐに止まります。
息子の手押し車椅子の電動化ユニット製作
— おぎ-モトキ@父親エンジニア (@ogimotoki) 2021年5月23日
電装系も無事ハック完了!
今まで使ってたシンプル3ボタンスイッチや、無線介助スイッチでも操作できる様になった!
子供車椅子を乗せても倒れない安全性も確認済
速度調整と周辺パーツの調整を加えて、いよいよ息子と試走予定#家族のためのモノづくり pic.twitter.com/8MvRLobxmP
介助サポートする大人は電動台車から離れた位置で安全性を担保できるので、
子供は「自分一人の力で操縦しているんだ」という自信を持つ事ができます!
安全性と自立心を両立する無線介助システム
ですね!
表示ディスプレイ
実際に日々の生活で使っていく上で、重要になってくるのは操作UIです。
介助者に分かりやすくはもちろんの事、息子や子供達に分かりやすくカッコいいデザインにする方が喜ばれそうです。
そこで、お馴染みのM5Stackを使って、状態表示ディスプレイ 及び 簡単なモード切替機能を持たせます。
(ボタンが3つついていますので、例えば速度の切替えや走行モード切替などに活用できます)
本電動台車には、
— おぎ-モトキ@父親エンジニア (@ogimotoki) 2021年5月23日
速度表示やジョイスティック指示方向を表示するM5Stack簡易ディスプレイを搭載してみた
ボタン押して走行モード変更や速度調整も出来る
磁石で取り外し可能なので、息子の前に本ディスプレイを置いて、移動方向を分かりやすく見せる手段に活用出来る試してみたい pic.twitter.com/yI2u5LTBW2
表示するもの/役割としては
・ジョイスティックの操作方向
・前進速度(cm/秒)
・回転速度(°/秒)
・走行モード表示
・速度モード表示
・無線コントローラ接続通知
などです。
ジョイスティック+操作コントローラの状態をディスプレイに矢印で表示させる事で
息子自身に
「自分で押したボタンによって進む方向を可視化させ、操作と動作の因果関係を理解してもらう」
効果を狙っています。
描画ライブラリには、業界おなじみのLovyanGFX を使わせて頂きました。
操作方法はこちらのサイトが最も参考にさせて頂きました。
これを使えば、ぬるっと動くディスプレイ画面を実現できますのでとてもお勧めです!
(もっと早く使い始めておけばよかった…)
これを使ったM5StackでのUI工夫については、また別記事で紹介していければと思います。
製作その後
2021年5月のGW期間をかけて製作し、約1カ月の期間を経て、5月末に息子に初搭乗して貰いました。

普段のモノづくりだと、使ってすぐに子供に試してもらうスタイルなのですが、モビリティとなると安全性の確認はとくにかく最優先。
特に転落/分解があると肢体不自由な子は自分の力で受け身や回避ができないので、大怪我に繋がる恐れがあります!
(自分の作ったモノで大事な人をケガさせてはいけないので、そこは慎重に取り組んでいます。)
最低限の安全性は念を入れてチェックを入れて重ね、大丈夫な自信が付いたところで週一回ベースで利用する方にしました。
近所の散歩コースを走る事を繰り返し、細かい使い勝手も含めて改良を繰り返す事にしました。
使い続けた感触として、
息子の操作バリエーションがすごく増えた事に気づきました!
いつもの散歩コースをガンガン進んだり、時々後ろを振り返って「ちゃんと付いてきてるかー?」ってチェックしたり、
交差点で「あっちに行ってみようかなー?」とクルクル旋回して迷ってみたり、
単に「行きたいところに行く手段」を超えて、
『動ける』事で自分の意志を表現してる!
電動移動機器は、単なる移動手段ではなく、
『自己表現装置の一つ』ですね。
そして、小学校への登下校や体育の授業、運動会での活用などを目指して、
ここから開発者の手を離れて使って貰うための改良に繋げていきました。
この実用導入に向けた取り組みや追加開発機能に関して、次の記事で紹介していければと思います。